
I received my Ph.D. in Aerospace Engineering from Nanyang Technological University (NTU), Singapore. I am currently a Research Fellow at the Air Traffic Management Research Institute (ATMRI), NTU. My research centers on AI and optimization for safety-critical air transportation systems with a focus on: (i) Safe and scalable low-altitude UAM and AAM planning and operations, (ii) Human-centered AI for resilient ATM and regional ATFM, (iii) AI-driven decision support for intelligent transportation systems.
Research Summary
- Systems and stakeholders: Contributed to deployable prototypes for low-altitude UAM traffic management, resilient ATM decision support under thunderstorms, and an ongoing AI-Assisted Regional ATFM system.
- Publications: 30+ top journal and conference papers (15 first authored), including Transportation Research Part C/E, Reliability Engineering & System Safety, Advanced Engineering Informatics, IEEE T-ITS/TVT; AAMAS 2026 (oral). 900+ citations on Google Scholar.
- Leadership and teamwork: Team Lead (16-person team) for CAAS FlexMAN project (Apr 2026 - Now); Technical lead (7-person team) for AI-assisted regional ATFM (Aug 2025 – Mar 2026); team lead (3-person team) for Singapore–Italy AI4ATM project (Apr 2024 – Mar 2026).
- Funding and grants: Experience in national/agency programs (CAAS, NRF, A*STAR, Singapore, NSF China) and grant proposal writing (lead writer / technical coordinator roles listed below).
- Teaching and mentoring: Teaching assistant experience; mentored 2 Ph.D. students, 3 M.Sc. students, and 5 undergraduate final-year projects; co-authored 10+ peer-reviewed publications with students.
🔥 News
- 2026.05: Two papers accepted by IEEE ITSC 2026 on scalable MARL and prediction-then-optimization. Congrats to the first authors, Dr Mingcheng and Dr Yixi.
- 2026.04: I was appointed as Team Lead for the FlexMAN project, aiming to foster human–AI hybrid automation for NextGen Air Traffic Management systems.
- 2026.02: Singapore Airshow 2026 — Invited as an exhibitor to showcase the AI-assisted Regional ATFM prototype for aviation stakeholders. Grateful for engaging discussions with colleagues from AIR Lab, MITRE Asia, A*STAR, and SUTD.
- 2026.01: AAMAS 2026 — Full paper accepted for oral presentation on constrained multi-agent reinforcement learning for safe planning. Thanks to all co-authors for the collaboration.
- 2025.11: Visited ETH Zurich for discussions on multi-agent systems and privacy-preserving decision making with Dr Fan. Looking forward to future collaborations.
- 2025.10: Presented our research on automated AI tools for next-generation air transportation at ICTAI 2025 in Greece.
- 2025.08: Appointed as Technical Lead for the AI-assisted Regional ATFM project. Honoured to work with PI Prof. Luu Anh Tuan.
- 2025.08: Hosted Prof. Eri Itoh (The University of Tokyo) for a workshop on Regional ATFM and collaborative decision making. Thanks for the inspiring exchange.
- 2025.05: Had an insightful talk session with Mr. Yu, Founder and CEO of ToBlue Aviation Digital (Fintech start-up) in New York City, USA, on potential collaboration in AI-driven digitalization for aviation asset valuation and management.
- 2025.05: Delivered a research talk at University of Michigan, Ann Arbor. Many thanks to Prof. Max Li for the kind invitation and hospitality.
- 2024.04: Appointed as Team Lead for the Singapore–Italy AI4ATM collaborative project on resilient aircraft operations under convective weather. Grateful to work with Prof. Guglielmo Lulli and his team from Lancaster University, UK.
- 2023.12: Joined ATMRI, NTU as Research Fellow to work on human–AI teaming for Advanced Air Mobility.
- 2023.10: Successfully defended my Ph.D. thesis on AI for safe and efficient Urban Air Mobility. Heartfelt thanks to my supervisors Prof. Kin Huat Low, Prof. Chen Lv, and Prof. Vu N. Duong for their guidance and support throughout the journey.
📝 Publications
Recent Highlights
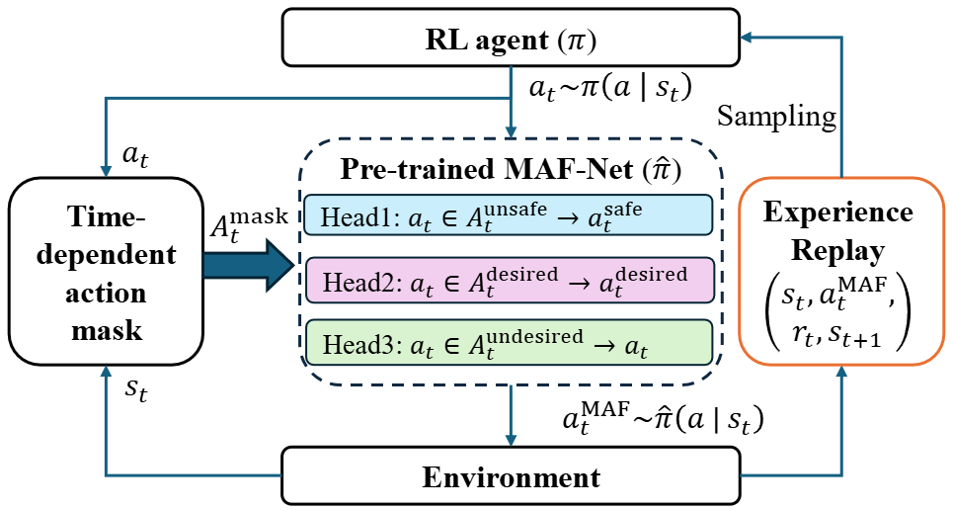
[AI for ATM] Constrained Multi-Agent Reinforcement Learning with MAF-Net for Safe Trajectory Planning
Bizhao Pang, Mingcheng Zhang, Xinting Hu, Duc-Thinh Pham, Sameer Alam, Guglielmo Lulli
Proc. of the 25th International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2026)
- MAF-Net: A multi-head action filter network integrated with decentralized MARL to enable safe and scalable multi-agent planning under uncertainty.
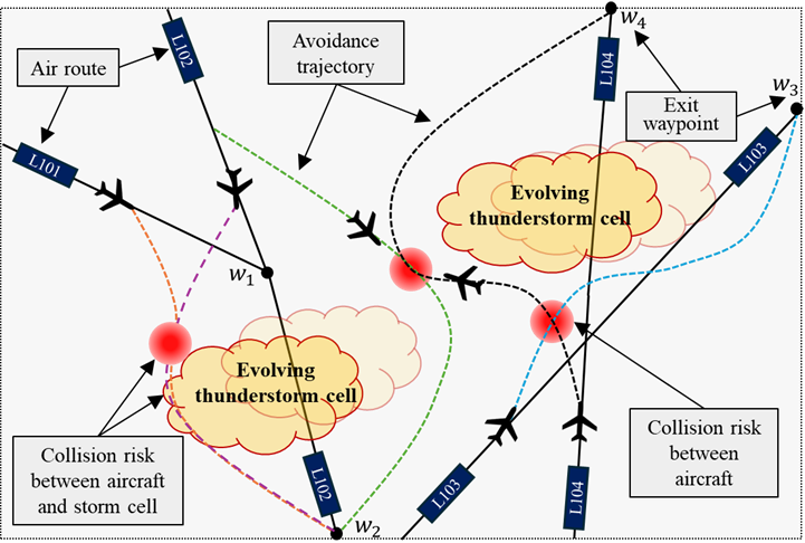
[AI for ATM] A multi-aircraft co-operative trajectory planning model under dynamic thunderstorm cells using decentralized deep reinforcement learning
Bizhao Pang, Xinting Hu, Mingcheng Zhang, Sameer Alam, Guglielmo Lulli
Advanced Engineering Informatics
- A framework for multi-aircraft trajectory planning under dynamic thunderstorms.
- A Decentralized MDP for cooperative planning to handle secondary conflicts.
- An improved Independent Deep Deterministic Policy Gradient solution algorithm.
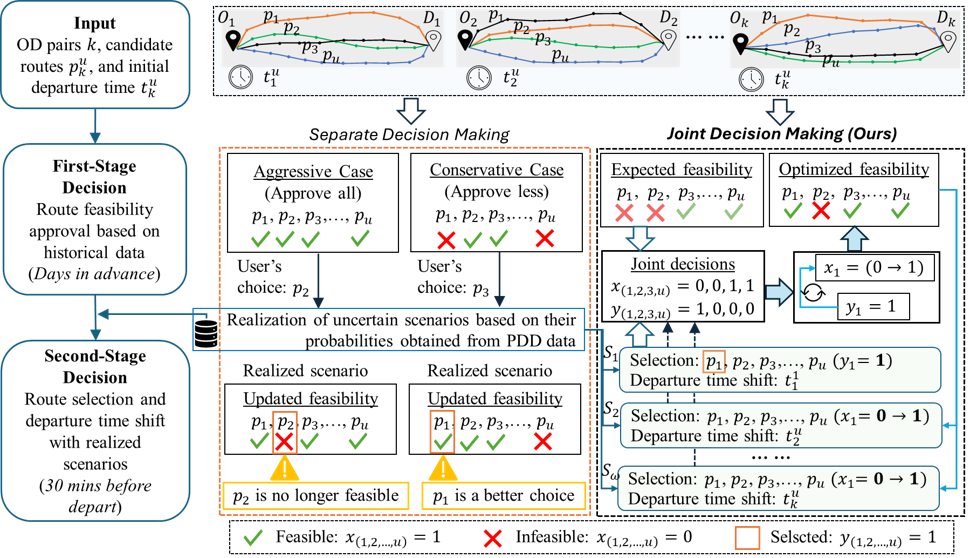
[Safe AAM] Stochastic route optimization under dynamic ground risk uncertainties for safe drone delivery operations
Bizhao Pang, Xinting Hu, Wei Dai, Kin Huat Low
Transportation Research Part E: Logistics and Transportation Review
- A two-stage stochastic optimization method for AAM risk management.
- Flight approval and execution decisions are made jointly to mitigate dynamic ground risk.
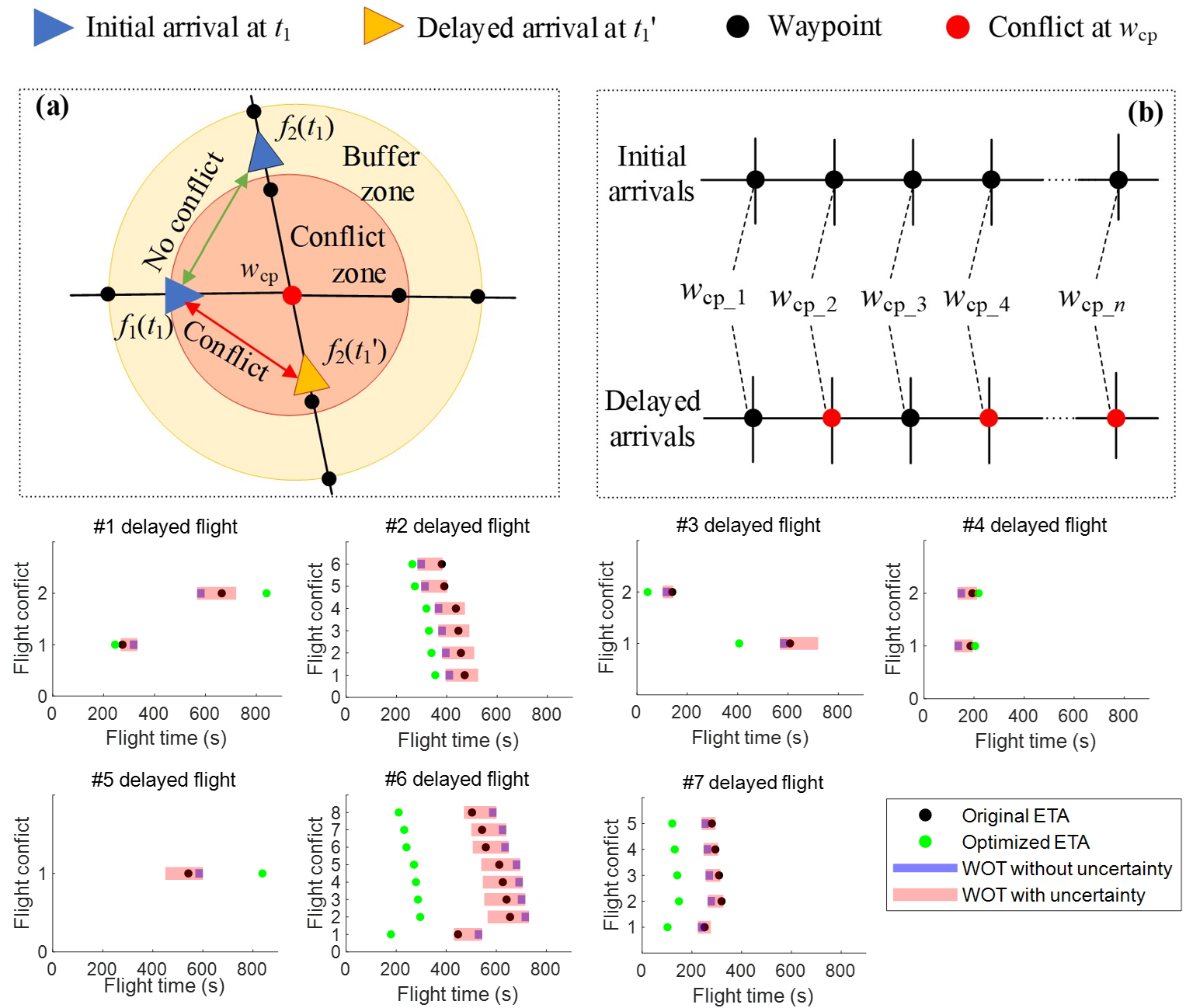
[Safe AAM] Chance-constrained UAM traffic flow optimization with fast disruption recovery under uncertain waypoint occupancy time
Bizhao Pang, Kin Huat Low, Vu N. Duong
Transportation Research Part C: Emerging Technologies
- A chance-constrained UTFM model is developed to optimize UAM traffic flow under trajectory uncertainty.
- A concept of Waypoint Occupancy Time is proposed to manage dynamic separation.
- A hierarchical stochastic search algorithm is designed to solve the non-convex UTFM optimization problem.
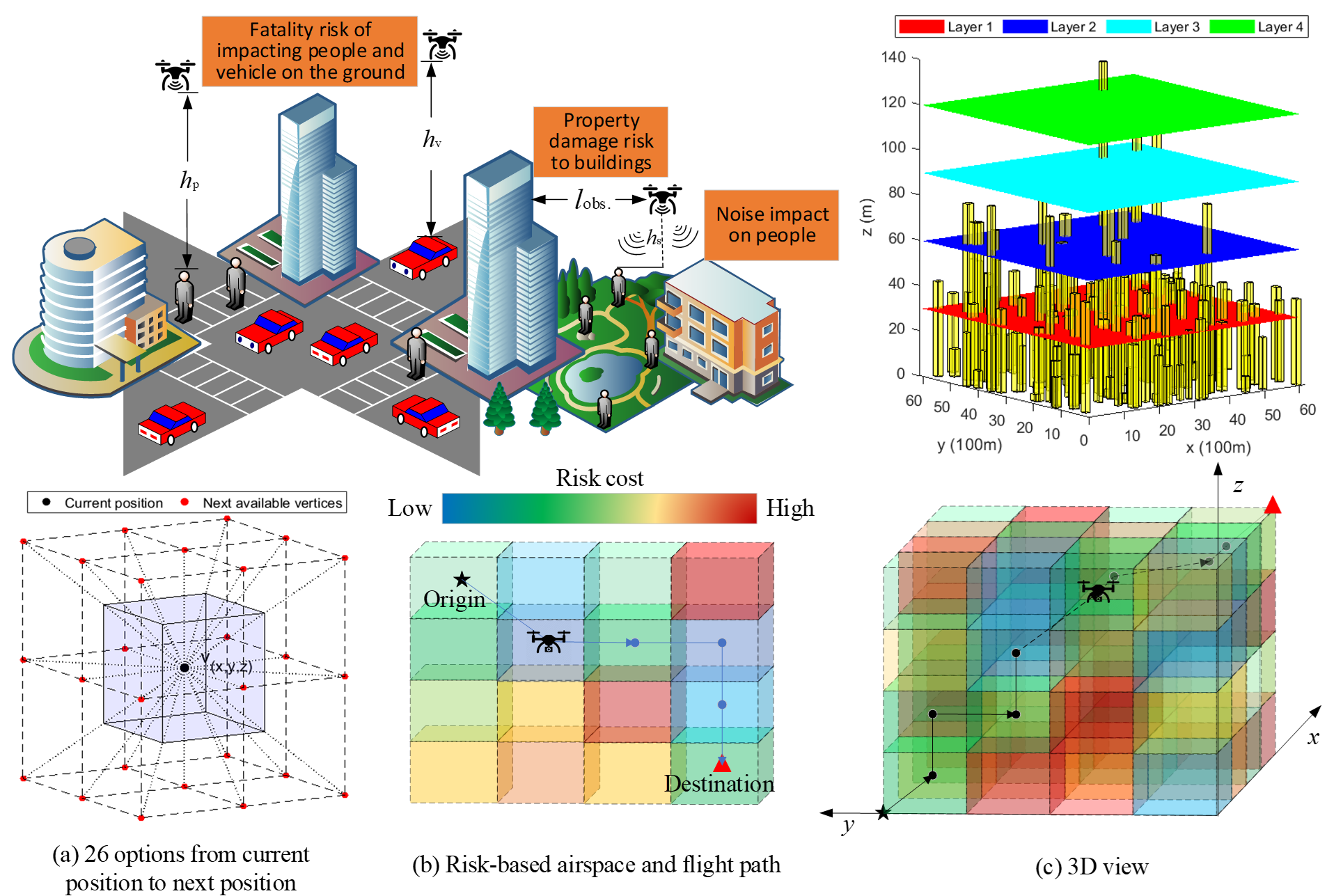
[Safe AAM] UAV path optimization with an integrated cost assessment model considering third-party risks in metropolitan environments
Bizhao Pang, Xinting Hu, Wei Dai, Kin Huat Low
Reliability Engineering & System Safety
- A third-party risk assessment framework incorporating fatality risk, property damage risk, and noise impact for safe and societally acceptable UAM operations in low-altitude urban airspace.
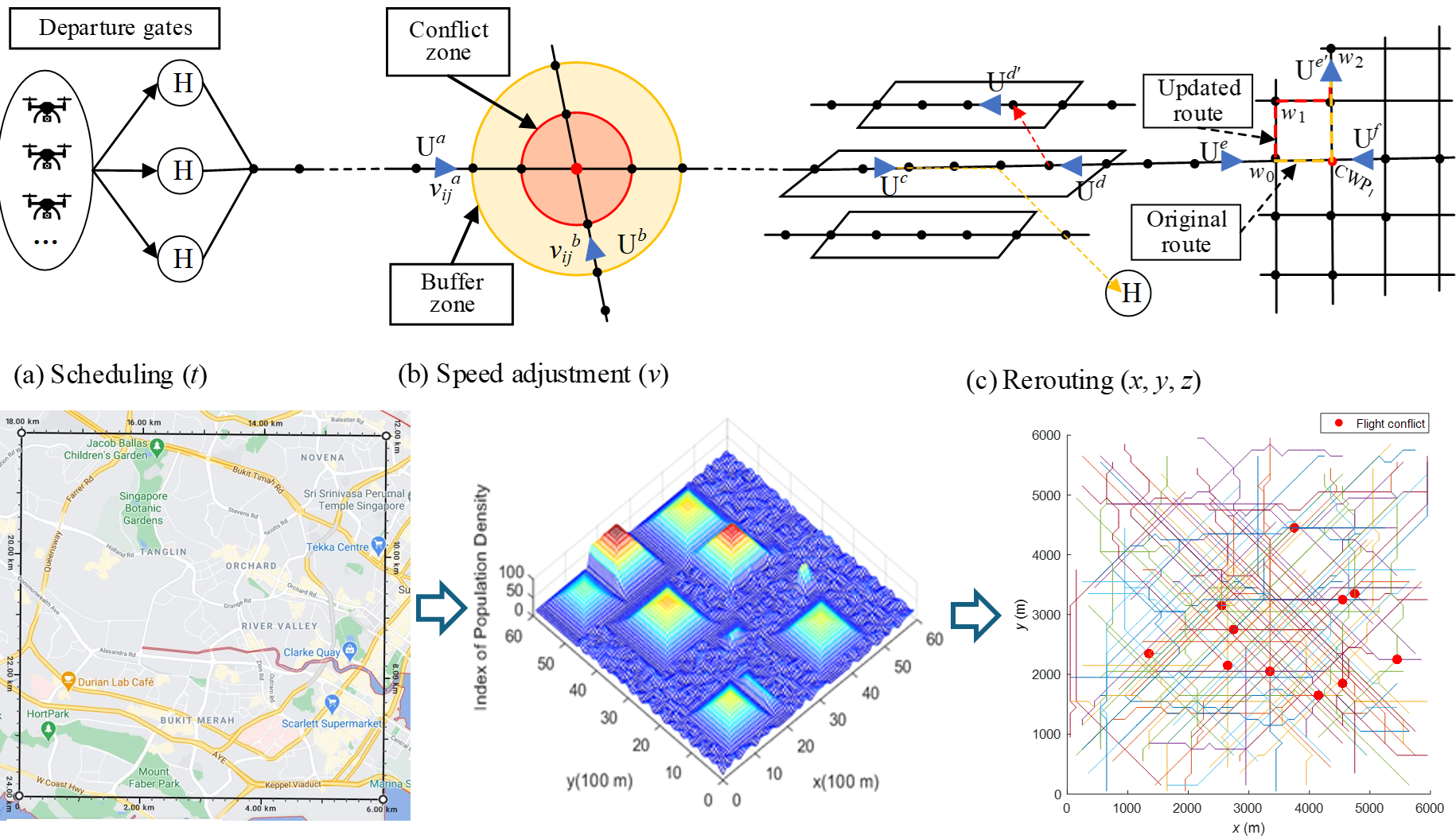
[Safe AAM] Adaptive conflict resolution for multi-UAV 4D routes optimization using stochastic fractal search algorithm
Bizhao Pang, Kin Huat Low, Chen Lv
Transportation Research Part C: Emerging Technologies
- An adaptive UAV conflict resolution framework for 4D route optimization that integrates scheduling, speed adjustment, and rerouting strategies.
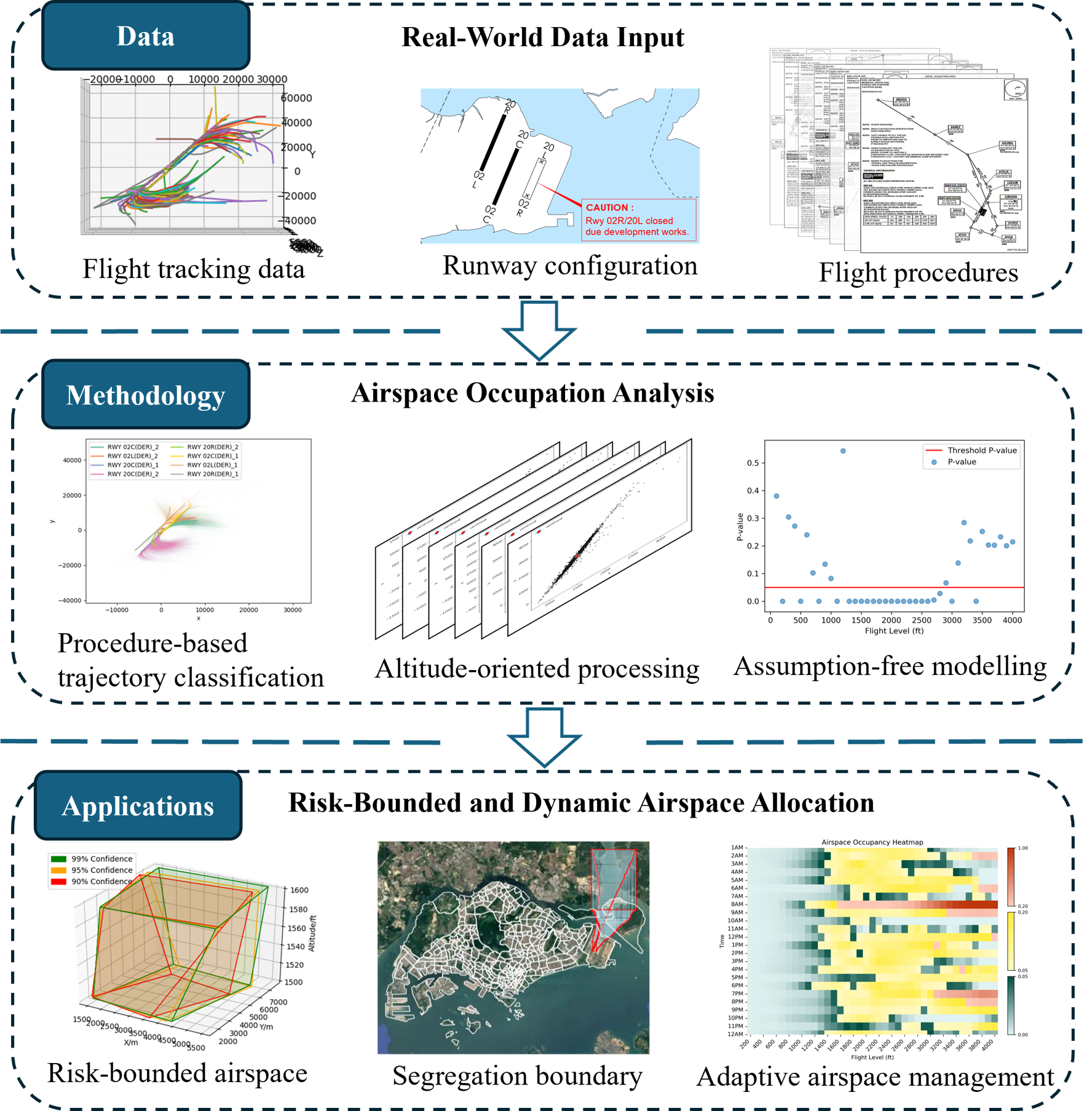
[UAM-ATM Integration] U-Aerodrome: Data-driven and risk-bounded airspace reconfiguration for safe integration of urban air mobility at aerodrome
Xinting Hu, Bizhao Pang* , Sameer Alam, Mir Feroskhan (*PhD mentor)
Transportation Research Part C: Emerging Technologies
- U-Aerodrome, a data-driven and risk-bounded airspace reconfiguration framework designed to support the safe and flexible integration of UAM operations near controlled aerodromes.
- Probabilistic and risk-bounded framework to optimize spatiotemporal boundaries.
- Handling Gaussian and non-Gaussian data distributions for robust safety assurance.
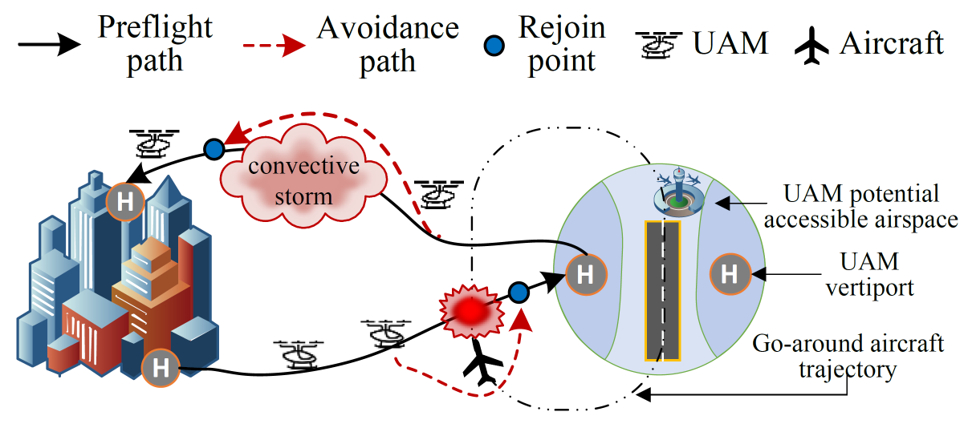
[UAM-ATM Integration] U-SAFE: UAM Safe Integration into Aerodrome via Bio-Inspired and Reinforcement Learning-Based Trajectory Planning
Xinting Hu, Bizhao Pang, Sameer Alam, Mir Feroskhan
Under 2nd review, 2026.
- An integrated trajectory planning framework that combines proactive risk-based planning with reactive inflight conflict resolution near aerodromes.
Selected Journal Papers
* Corresponding author
- Bizhao Pang, Xinting Hu, Mingcheng Zhang, Sameer Alam, Guglielmo Lulli. In-flight multi-aircraft trajectory replanning under dynamic thunderstorm cells using decentralized deep reinforcement learning. Advanced Engineering Informatics, 65 (2025): 103157. DOI.
- Bizhao Pang, Xinting Hu, Wei Dai, Kin Huat Low. Stochastic route optimization under dynamic ground risk uncertainties for safe drone delivery operations. Transportation Research Part E, 192 (2024): 103717. DOI.
- Bizhao Pang, Kin Huat Low, Vu N. Duong. Chance-constrained UAM traffic flow optimization with fast disruption recovery under uncertain waypoint occupancy time. Transportation Research Part C, 161 (2024): 104547. DOI.
- Bizhao Pang, Kin Huat Low, Chen Lv. Adaptive conflict resolution for multi-UAV 4D routes optimization using stochastic fractal search algorithm. Transportation Research Part C, 139 (2022): 103666. DOI.
- Bizhao Pang, Xinting Hu, Wei Dai, Kin Huat Low. UAV path optimization with an integrated cost assessment model considering third-party risks in metropolitan environments. Reliability Engineering & System Safety, 2022: 108399. DOI.
- Bizhao Pang, Wei Dai, Xinting Hu, Fuqing Dai, Kin Huat Low. Multiple air route crossing waypoints optimization via artificial potential field method. Chinese Journal of Aeronautics, 34(4), 2021. DOI.
- Xinting Hu, Bizhao Pang, Sameer Alam, Mir Feroskhan. U-Aerodrome: Data-driven and risk-bounded airspace reconfiguration for safe integration of Urban Air Mobility at aerodrome. Transportation Research Part C, 184 (2026): 105506. DOI
- Mingcheng Zhang, Bizhao Pang, Chao Yan, Mir Feroskhan, Chen Lv. Real-time avoidance of building and dynamic geo-fencing for urban air mobility using deep reinforcement learning. IEEE Transactions on Intelligent Transportation Systems (2025). DOI.
- Wei Dai, Bizhao Pang, Kin Huat Low. Conflict-free four-dimensional path planning for urban air mobility considering airspace occupancy. Aerospace Science and Technology, 119 (2021): 107154. DOI.
- Yu Wu, Kin Huat Low, Bizhao Pang, Qingyu Tan. Swarm-based 4D path planning for drone operations in urban environments. IEEE Transactions on Vehicular Technology, 70(8), 7464–7479, 2021. DOI.
Selected Conference Papers
* Corresponding author
- Bizhao Pang, Mingcheng Zhang, Xinting Hu, Thinh Pham, Sameer Alam, Guglielmo Lulli. Constrained Multi-Agent Reinforcement Learning with MAF-Net for Safe Trajectory Planning. 25th International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2026), Paphos, Cyprus, May 25–29, 2026. (Oral)
- Bizhao Pang, Xinting Hu, Mingcheng Zhang, Sameer Alam, Guglielmo Lulli. Decentralized Deep Reinforcement Learning for Cooperative Multi-Agent Flight Trajectory Planning in Adverse Weather. 24th International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2025), Detroit, Michigan, USA, May 19–23, 2025.
- Bizhao Pang, Xinting Hu, Yi Yang Poh, Kin Huat Low. Population density estimation for dynamic ground risk assessment of drone operations. IEEE/AIAA Digital Avionics Systems Conference (DASC) 2023, Barcelona, Spain.
- Bizhao Pang, Mingcheng Zhang, Chao Deng, Kin Huat Low. Investigation of flight technical error for UAV separation requirement. AIAA Aviation Forum (AVIATION) 2022.
- Bizhao Pang, C.H. John Wang, Kin Huat Low. Framework of level-of-autonomy-based concept of operations: UAS capabilities. IEEE/AIAA Digital Avionics Systems Conference (DASC) 2021.
- Bizhao Pang, Wei Dai, Thu Ra, Kin Huat Low. A concept of airspace configuration and operational rules for UAS. IEEE/AIAA Digital Avionics Systems Conference (DASC) 2020, San Antonio, TX, USA.
- Bizhao Pang, Ng Ee Meng, Kin Huat Low. UAV trajectory estimation and deviation analysis for contingency management. AIAA Aviation Forum (AVIATION) 2020, Reno, Nevada, USA.
- Bizhao Pang, Qingyu Tan, Kin Huat Low. A risk model based traffic network for adaptive urban airspace management. AIAA Aviation Forum (AVIATION) 2020, Reno, Nevada, USA.
- Bizhao Pang, Ng Ee Meng, Kin Huat Low. Contingency management of urban UTM based on airspace contexts. ICAO UAS Industry Symposium 2019, Montreal, Canada.
- Mingcheng Zhang, Bizhao Pang*, Duc-Thinh Pham, Vu N. Duong, Sameer Alam, Anh Tuan Luu. Scalable Multi-Agent Reinforcement Learning for Decentralized UAM Deconfliction Considering Downstream Impact. IEEE International Conference on Intelligent Transportation Systems (ITSC) 2026, Naples, Italy, 15–18 September 2026. Accepted.
- Yixi Zeng, Chao Deng, Bizhao Pang*, Duc-Thinh Pham, Vu N. Duong, Sameer Alam, Anh Tuan Luu. Data-Driven Predict-then-Optimize for Demand-Capacity Balancing with Uncertain Aircraft Taxiing Time. IEEE International Conference on Intelligent Transportation Systems (ITSC) 2026, Naples, Italy, 15–18 September 2026. Accepted.
📖 Education
- 2020.08 – 2023.10, Doctor of Philosophy (AI and Intelligent Transportation), Nanyang Technological University, Singapore
- 2016.09 – 2019.06, Master of Engineering (ATM and Operations Research), Civil Aviation University of China, Tianjin, China
- 2012.09 – 2016.06, Bachelor of Engineering (Air Transportation), Civil Aviation University of China, Tianjin, China
💼 Work Experience
- 2023.12 – Present, Research Fellow, Air Traffic Management Research Institute (ATMRI), NTU, Singapore
- Flexible Extended Arrival Management (FlexMAN) (Apr 2026 – Present) — Team Lead: Developing human-AI hybrid automation for NextGen Air Traffic Management systems.
- AI-assisted Regional ATFM (Aug 2025 – Mar 2026) — Tech Lead: Conceptualizing and developing a distributed AI-assisted cross-border ATFM system for ASEAN.
- AI4ATM (Apr 2024 – Mar 2026) — Team Lead: Leading a cross-national team developing advanced AI models for resilient ATM under thunderstorms.
- UAM System Development (Dec 2023 – Apr 2024) — Algorithm Scientist: Developed a safe and scalable AI-based UAM system for Singapore’s highly urbanized airspace.
- 2019.08 – 2020.08, Research Associate, Air Traffic Management Research Institute (ATMRI), NTU, Singapore
- UTM System with AirMatrix Concept — Developed a digital low-altitude urban airspace management system for UAM.
- Risk-based UAM Concept and Algorithm — Developed risk-based concepts and planning algorithms for safe UAM operations.
🔬 Research Projects
AI for Resilient ATM and Cross-Border ATFM Systems
- AI-assisted Regional Air Traffic Flow Management (NRF, Singapore). Aug 2025 – Present — Technical Lead, AI Scientist (7 team members). Leading multidisciplinary research, coordinating with aviation authority and industry stakeholders.
- Singapore–Italy Collaborative Project: AI for Air Traffic Management (AI4ATM). Apr 2024 – Present — Team Lead, AI Scientist (3 team members). Developing AI algorithms for multi-aircraft separation assurance, thunderstorm avoidance, and sequencing.
- Airspace and Air Traffic Flow Modeling and Optimization (NSF, China). Sep 2016 – Mar 2019 — Data and Algorithm Engineer. Chinese Air Route Network Optimization; Terminal Airspace Optimization for Sustainable Aviation.
Low-Altitude UAM and AAM: Concepts, Research, and Development (NRF, Singapore)
- Scalable and Robust UAM Scheduling and Disruption Recovery. Apr 2021 – Mar 2024 — Team Lead, AI Algorithm Researcher.
- Risk-based UAM Path Optimization Using Machine Learning. Jan 2022 – Mar 2024 — Team Lead, AI Algorithm Researcher.
- UTM Platform Development with AirMatrix Concept. Apr 2019 – Mar 2023 — Algorithm Engineer.
- UTM and ATM Integration in Low-Altitude Urban Airspace. Apr 2019 – Mar 2021 — Data Engineer.
🎤 Selected Presentations and Talks
- Feb 2026 Introduction and Demonstration of an AI-Assisted Regional ATFM Prototype
Singapore Airshow 2026, Singapore - May 2025 Multi-Agent Aircraft Trajectory Planning Using Decentralized MARL
University of Michigan, Ann Arbor, MI, USA - May 2025 Decentralized DRL for Cooperative Multi-Aircraft Trajectory Planning
AAMAS 2025, Detroit, MI, USA - Sep 2023 Population Density Estimation for Dynamic Ground-Risk Assessment of Drone Operations
IEEE/AIAA Digital Avionics Systems Conference (DASC) 2023, Barcelona, Spain - Dec 2022 Scientific Paper Writing and Response to Reviewers’ Comments
Civil Aviation University of China (CAUC), Tianjin, China - Nov 2021 Risk Modelling and Assessment for UAM Operations in Urban Environments
Cranfield University, Online - Sep 2019 UAS Operations and Industry Perspectives
ICAO UAS Industry Symposium 2019, Montreal, Canada



